Njemački istraživački centar za umjetnu inteligenciju (DFKI) i Sveučilište u Bremenu rade na simian robota iStruct Demonstrator, a klasificira se kao "roboti". Sada mehanički majmuni prolaze testove za hodanje i ravnotežu u uvjetima blizu reljefa Mjeseca.

Proučavanje opasnih lunarnih površina zahtijeva korištenje različitih oblika kretanja, a istraživači iz DFKI proučavaju svoje sposobnosti (uključujući kombinaciju nogu, kotača i gusjenica). Roboti slični majmunima imaju određene prednosti u usporedbi s kotačima, podrška u četiri točke omogućuje stvaranje stabilnijeg položaja prilikom penjanja kroz prepreke ili brdovitom terenu. Robot može uravnotežiti svoje stražnje noge kako bi oslobodio forelimbs kako bi izvršio svaku akciju.

S novim međunarodnim interesima u lunarnoj misiji, postoji mogućnost da će iStruct (ili jedan od njegovih potomaka) moći posjetiti Mjesec. Kolonizacija Mjeseca robota će započeti s razvojem koji se može razviti i razumno reagirati u svakoj trenutnoj situaciji. U tom smislu, cilj projekta je izgraditi "naprednu umjetnu inteligenciju" i robotski sustav koji može naučiti i kretati se oko sebe.
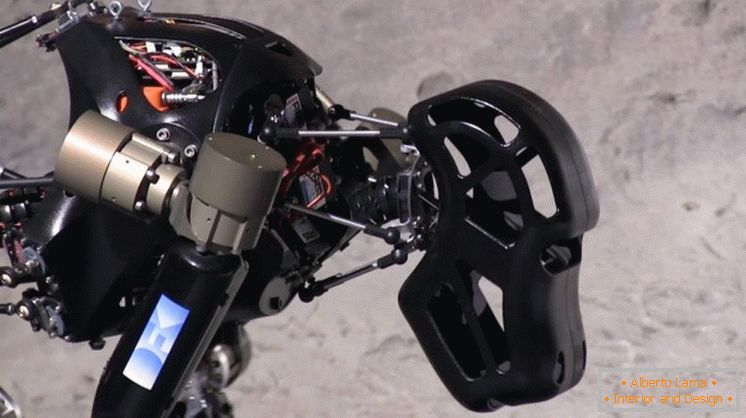
Robot ima zglobnu kralježnicu koja povezuje prtljažnik i zdjelicu, dajući mu veću fleksibilnost, kao i osjetnik opterećenja za stopalo i gležanj koji reagiraju kada su u dodiru s tlom.
Ostale značajke uključuju:
- 43 neovisna motora;
- Šest dodatnih FSR senzora na otvorenim dijelovima koji se koriste za otkrivanje prepreka;
- 6-osni momentni senzor;
- Digitalni 3-osi akcelerometar, da percipiraju orijentaciju stopala u prostoru;
- Dva temperaturna senzora za kompenziranje promjena temperature u elektronici;
- Digitalni magnetski senzor za kutnu kontrolu svake pokretne osi nogu i zgloba;
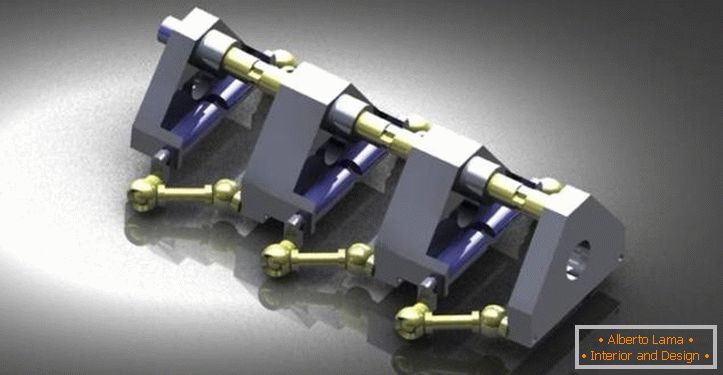
Većina robota već sadrži mnoge od tih senzora, ali artikulirana kralježnica iStruct (koja može funkcionirati kao 6-osi zakretni moment) je svojevrsna rijetkost za lokomotornu robotu koja pomaže pri kretanju na sva četiri. Senzori u zglobovima stopala i gležnja omogućit će mu ravnotežu na nagnutim površinama.
U 2008. i 2009. godini diplomirani inženjer Daniel Kuhn radio je na sličnom robotu. Mali majmun koji je bio sposoban za jednostavno hodanje s četiri noge. Nakon ovog projekta, počeo je raditi na iStructu, koji ima niz značajnih ažuriranja. To je mnogo veća težina od 18 kg i dimenzija 66 x 43 x 75 cm (26 x 17 x 29 inča), a također sadrži 26 stupnjeva slobode, a pokreću različiti električni motori. Projekt bi trebao biti dovršen u kolovozu ove godine.
Možete vidjeti kako koristi svoje intelektualne noge i gležnjeve prilikom hodanja i održavanja ravnoteže u video ispod. Ovo je mali korak za robota majmuna, ali potencijalno ogroman skok za svu robotiku sličnog dizajna.
hodanje
balansiranje
Fotogalerija Ukupno | 14 slika












")

